Oscilațiile unui sistem cu mai multe grade de libertate, care au aplicații practice importante, diferă de oscilațiile unui sistem cu un grad de libertate într-un număr de caracteristici semnificative. Pentru a face o idee despre aceste caracteristici, să luăm în considerare cazul oscilațiilor libere ale unui sistem cu două grade de libertate.
Fie ca poziția sistemului să fie determinată de coordonate generalizate și să fie sistemul în echilibru stabil. Apoi energiile cinetice și potențiale ale sistemului, exacte la pătratele cantităților mici, pot fi găsite în același mod în care au fost găsite egalitățile (132), (133) și prezentate sub forma:

unde coeficienții de inerție și coeficienții cvasi-elastici sunt mărimi constante. Dacă folosim două ecuații Lagrange de forma (131) și substituim aceste valori ale lui T și P în ele, obținem următoarele ecuații diferențiale pentru oscilații mici ale unui sistem cu două grade de libertate

Vom căuta o soluție la ecuațiile (145) sub forma:
unde A, B, k, a sunt constante. Înlocuind aceste valori în ecuațiile (145) și reducând prin obținem
Pentru ca ecuațiile (147) să dea soluții pentru A și B care sunt diferite de iulie, determinantul acestui sistem trebuie să fie egal cu zero sau, în caz contrar, coeficienții pentru A și B din ecuații trebuie să fie proporționali, i.e.
De aici, pentru definiție, obținem următoarea ecuație, numită ecuație de frecvență.
Rădăcinile acestei ecuații sunt reale și pozitive; acest lucru este dovedit matematic, dar poate fi justificat și prin faptul că altfel ecuațiile (145) nu vor fi reale și nu vor avea soluții de forma (146), ceea ce nu poate fi cazul unui sistem în echilibru stabil (după perturbări trebuie să se apropie de poziție
După ce am definit (149), găsim două seturi de soluții parțiale de forma (146). Având în vedere că, conform acestor decizii, vor exista:
unde și sunt valorile pe care le obținem din (148) la și respectiv.
Oscilațiile definite de ecuațiile (150) și (151) se numesc oscilații principale, iar frecvențele și kg lor sunt frecvențele naturale ale sistemului. În acest caz, o oscilație cu o frecvență (întotdeauna mai mică) se numește prima oscilație principală, iar cu o frecvență - a doua oscilație principală. Numerele care definesc rapoartele amplitudinilor (sau coordonatele în sine, adică) în fiecare dintre aceste oscilații sunt numite coeficienți de formă.
Deoarece ecuațiile (145) sunt liniare, sumele soluțiilor parțiale (150) și (151) vor fi, de asemenea, soluții ale acestor ecuații:
Egalitățile (152), care conțin patru constante arbitrare determinate de condițiile inițiale, dau o soluție generală ecuațiilor (145) și determină legea micilor oscilații a sistemului. oscilațiile sunt compuse din două oscilații principale cu frecvențe și nu sunt armonice. În cazuri particulare, în condiții inițiale adecvate, sistemul poate efectua una dintre oscilațiile principale (de exemplu, prima, dacă) și oscilația va fi armonică.
Frecvențele naturale și coeficienții de formă nu depind de condițiile inițiale și sunt principalele caracteristici ale micilor oscilații ale sistemului; rezolvarea unor probleme specifice se reduce de obicei la determinarea acestor caracteristici.
Comparând rezultatele acestui paragraf și cele anterioare, se poate face o idee despre ce se va reduce studiul oscilațiilor amortizate și forțate ale unui sistem cu două grade de libertate. Nu vom lua în considerare acest lucru; vom observa doar că în timpul oscilațiilor forțate, rezonanța într-un astfel de sistem poate apărea de două ori: la și la ( este frecvența forței perturbatoare). În sfârșit, observăm că oscilațiile unui sistem cu s grade de libertate vor fi compuse din s oscilații cu frecvențe care trebuie determinate din ecuația gradului s relativ la acesta.Acest lucru este asociat cu dificultăți matematice semnificative, care pot fi depășite. cu ajutorul calculatoarelor electronice (sau mașinilor analogice).

Problema 185. Să se determine frecvențele naturale și coeficienții de formă ai micilor oscilații ale unui pendul fizic dublu format din tije și 2 de aceeași masă și lungime l (Fig. 374, a).
Soluţie. Să alegem unghiuri mici ca coordonate generalizate. Apoi , unde și, cu precizia de calcul necesară, . În cele din urmă
Fie dat un sistem cu două grade de libertate și sunt coordonate generalizate. Energia cinetică și potențială a sistemului este dată de formulele (10.2):
Funcțiile T și P sunt cu siguranță pozitive și, prin urmare:
Înlocuind (10.2) în (10.12), obținem ecuații diferențiale pentru mici oscilații ale unui sistem cu două grade de libertate:
Sistemul are o soluție zero A=B=0, corespunzătoare unei poziții stabile de echilibru. Pentru soluții diferite de zero, compunem din (10.15) relația:
Datorită inegalităților de stabilitate, ecuația pătratică (față de ) (10.18) are două rădăcini reale pozitive. Să le aranjam în ordine crescătoare:
Pentru a doua vibrație principală:
| (10.21) |
Principalele vibrații sunt vibrațiile armonice.
Înlocuind și la rândul său în (10.16), găsim legăturile dintre amplitudinile A și B în principalele vibrații: . Factorii se numesc coeficienți de formă proprie (coeficienți de distribuție a amplitudinii). Ele pot fi atât pozitive, cât și negative. Când ambele coordonate din oscilația principală sunt în aceeași fază; la - în antifază.
Mișcarea rezultată de-a lungul fiecărei coordonate va fi suma a două oscilații principale:
| (10.22) |
unde - depind de condițiile inițiale, - nu depind de condițiile inițiale și sunt determinate de parametrii sistemului oscilator însuși. În cazul general, frecvențele și sunt incomensurabile și, prin urmare, mișcarea rezultată nu va fi periodică.
1. Determinați frecvențele naturale și modurile naturale de vibrație (mice) ale unui pendul matematic dublu format din două puncte materiale de masă m egală și câte două tije de lungime.
Un sistem similar în formă generală a fost luat în considerare în Exemplul 2 (§34). Să folosim formulele (2) și (3) obținute acolo.
Când , obținem:
Deoarece oscilațiile sunt mici, atunci până la cele mici de ordinul doi inclusiv:
| (3) |
Ținând cont de (3) din (1), notăm:
| (4) |
Comparând (4) și (2), observăm:
Expandand ecuatia (7.52) a frecventelor, obtinem:
Din (9.50) găsim coeficienții de distribuție: .
Prima oscilație majoră:
Mișcare în fază - în fiecare moment tijele se rotesc într-o direcție.
A doua ezitare principală:
Miscare in antifaza - in fiecare moment tijele se rotesc in directii exact opuse.
Modurile de vibrație sunt prezentate în Fig. 50. În a doua vibrație principală există un punct special F, care rămâne nemișcat. Astfel de puncte se numesc noduri. Punctul final O nu este un nod.
2. Două corpuri rigide cu mase și și două arcuri cu rigiditate și sunt combinate într-un sistem care este situat pe un plan orizontal neted și poate efectua mici oscilații liniare.
Prima oscilație majoră:
Corpurile se deplasează în fază, fie la dreapta, fie la stânga. Amplitudinea de oscilație a celui de-al doilea corp este de 1,62 ori mai mare.
A doua ezitare principală:
Corpurile se deplasează în antifază: fie unul către celălalt, fie spre nod, fie se depărtează de nod. Amplitudinea oscilațiilor celui de-al doilea corp este de 0,62 din amplitudinea primului.
MECANICA TEORETICĂ
UDC 531.8:621.8
D.M. Kobylyansky, V.F. Gorbunov, V.A. Gogolin
COMPATIBILITATEA ROTIȚII ȘI VIBRAȚIILE CORPURILOR CU UN GRAD DE LIBERTATE
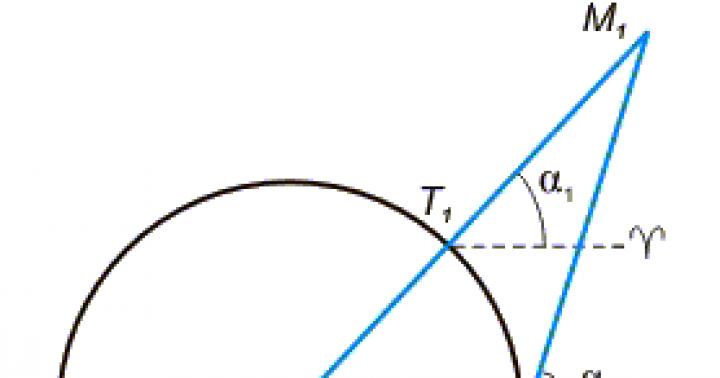
Să considerăm un corp plat T, căruia îi sunt impuse trei constrângeri ideale, împiedicând doar mișcarea corpului în toate direcțiile, așa cum se arată în Fig. 1a. Legăturile sunt punctele A, B, C, situate la vârfurile unui triunghi echilateral. După ce am ales un sistem de coordonate astfel încât centrul acestuia să coincidă cu centrul triunghiului și să fie aliniat cu acesta (Fig. 1a), avem coordonatele conexiunilor: A(0;R), B(^l/3 /2 -R/2), C^-Ld/e/2; -I/2), unde I este distanța de la centrul triunghiului până la vârfurile acestuia, adică raza cercului care trece prin punctele A, B, C. În această poziție, corpul va avea un grad de libertate. numai dacă normalele la limita sa în punctele A, B, C se intersectează într-un punct, care va fi centrul instantaneu al vitezelor. În caz contrar, numărul de grade de libertate al corpului este zero și nu se poate mișca numai translațional, ci și efectuează mișcare de rotație. Când un corp are un grad de libertate, acesta poate începe să se rotească cu centrul de rotație instantaneu în punctul de intersecție al normalelor de mai sus. Fie acest punct originea coordonatelor, punctul O. Dacă centrul de rotație instantaneu nu își schimbă poziția, atunci singura formă posibilă a corpului T este un cerc cu raza R cu centrul în punctul O.
Se pune problema: există alte forme ale corpului care îi permit să se rotească în raport cu un centru în mișcare, astfel încât
corpul corpului a trecut continuu prin trei puncte A, B, C fără a rupe aceste conexiuni? În literatura de specialitate cunoscută de noi, o astfel de problemă nu a fost luată în considerare și, aparent, este rezolvată pentru prima dată.
Pentru a rezolva această problemă, considerăm mai întâi mișcarea triunghiului ABC ca un corp rigid, raportat la sistemul de coordonate X1O1Y1 asociat cu corpul T (Fig. 1b). Apoi, dacă mișcarea triunghiului are loc în așa fel încât vârfurile sale să rămână continuu la limita corpului în timpul unei rotații complete a triunghiului cu 360°, atunci corpul va efectua și mișcarea necesară în sens invers față de cel fix. triunghiul ABC și sistemul de coordonate asociat XOU.
Definim mișcarea triunghiului ABC ca o rotație față de centrul O și o mișcare a centrului O de-a lungul axei ОіХі cu /(g), de-a lungul axei ОіУі cu g(t). Atunci ecuația parametrică a traiectoriei punctului A va avea forma: x = ryaSh +/(r); уі=г-єо,?ґ +g(t), ґє (1)
Deoarece la g=0 punctul O trebuie să coincidă cu punctul O1, atunci condiția /(0)= g(0)=0 trebuie îndeplinită. Cerem ca atunci când este rotit printr-un unghi r = 2n/3, punctul A coincide cu punctul B1, punctul B coincide cu punctul C și punctul C
Cu punctul A1. La întoarcerea printr-un unghi r = 4n/3, punctul A ar trebui să meargă în punctul C1, punctul B în punctul A1 și punctul C în punctul B1. Combinarea acestor cerințe pentru mișcarea vârfurilor triunghiului conduce la condiții pentru valorile funcțiilor de deplasare a centrului de rotație /(0)=/(2 p/3)=/(4 p/3)= 0; g0)=g(2l/3)=g(4l/3)=0 . (2) Condițiile (2) sunt îndeplinite de o clasă largă de funcții, în special funcții de forma sin(3mt/2), unde m este un număr întreg, și combinațiile lor liniare cu coeficienți în general variabili de forma:
H (g) = ^ bt (g) 8Іп(3тґ / 2)
Mai mult, ca
Fig.1. Schema de calcul: a) - poziţia corpului staţionar şi conexiunile acestuia în sistemul XOU; b) - poziția sistemului fix X1O1U1 asociat corpului și a sistemului mobil XOU asociat triunghiului ABC
Mecanica teoretică
Fig.2. Formele corpurilor și traiectoriile de mișcare ale centrelor lor de rotație
Orez. 3. Poziția corpului la întoarcerea în unghi și traiectoria corespunzătoare de mișcare a centrului său de rotație
pot fi luate funcţii de deplasare, funcţii care definesc curbe închise, precum cicloidele, trohoidele, lemniscatele, cu parametri potriviţi conform condiţiei (2). În acest caz, toate funcțiile posibile trebuie să fie periodice cu o perioadă de 2n/3.
Astfel, sistemul de ecuații parametrice (1) cu condiții asupra valorilor funcțiilor /(^, g(t) (2) sau în forma lor (3) oferă ecuația dorită pentru limita corpului T. Figura 2 prezintă exemple de posibile forme ale corpului care satisfac condițiile sarcinii.În centrul fiecărei figuri este prezentată traiectoria centrului de rotație O1, iar conexiunile punctuale A, B, C sunt mărite pentru o mai bună vizualizare a acestora. Aceste exemple arată că chiar și tipuri simple de funcții din clasa definită de expresia (3) cu coeficienți constanți dau avem un set destul de larg de curbe care descriu limitele corpurilor aflate în rotație și
oscilaţii simultan cu un singur grad de libertate. Curbele limită a), c) din Fig. 2 corespund mișcării centrului de rotație numai de-a lungul axei orizontale
ОіХі conform legii armonice și, după cum se poate observa, au două axe de simetrie și pot fi fie pur convexe, ovale (Fig. 2a), fie combina convexitatea cu concavitatea (Fig. 2b). Cu o lege armonică verticală și orizontală cu aceeași amplitudine de mișcare a centrului de rotație, curbele limită își pierd simetria (Fig. 2 c, d). Influența semnificativă a frecvenței vibrațiilor armonice asupra formei curbei de frontieră a unui corp este prezentată în Fig. 2 d, f. Fără a efectua o analiză completă a influenței amplitudinii și frecvenței asupra formei și proprietăților geometrice ale limitei curbe în această lucrare, aș dori să remarc că exemplele prezentate în Fig. 2 arată deja capacitatea de a rezolva probleme tehnice în alegerea formei dorite
corpul să-și combine mișcarea de rotație cu oscilațiile în planul de rotație.
Acum luând în considerare mișcarea corpului în raport cu sistemul de coordonate fix XOU asociat cu triunghiul ABC, adică trecând de la sistemul de coordonate X1O1U1 la sistemul de coordonate XOU, obținem următoarele ecuații parametrice ale curbei la graniță a corpului la un unghi de rotație dat p x = cosp-
Cosp(4)
sau ținând cont de ecuațiile (1), ecuațiile (4) iau forma x = cosp-
- [ R cos(t) + g (t) - g (p)] sin p, y = sin p +
Pentru că p.
Ecuațiile (5) fac posibilă descrierea traiectoriei oricărui punct al corpului în funcție de polaritățile sale date.
t-g.i m*4<. п-і
t-ÍLÍtWM. d-0
Orez. 4. Variante de forme ale corpului cu numere diferite de conexiuni, asigurând compatibilitatea rotației și vibrațiilor corpurilor
coordonatele finale R,t. În special, la R=0, t=0 avem un punct care coincide cu originea coordonatelor Ob, adică centrul de rotație, a cărui traiectorie în schema luată în considerare este descrisă de ecuațiile care urmează din (5) :
*0 = -f (ph) cos ph + g (ph) sin ph, y0 = - f (ph) sin ph- g (ph) cos r.
Figura 3 prezintă un exemplu de poziții ale corpului (Figura 2b) atunci când acesta este rotit printr-un unghi φ, iar în centrul fiecărei figuri este afișată traiectoria centrului de rotație
Oi, corespunzătoare rotației corpului prin acest unghi. Din punct de vedere tehnic, nu este dificil să faci animație
a mișcării corpului prezentată în Fig. 3 în locul unui model fizic, cu toate acestea, cadrul unui articol de jurnal poate permite acest lucru doar într-o versiune electronică. Exemplul prezentat era încă
O generalizare a problemei luate în considerare este un sistem de n conexiuni ideale sub formă de puncte situate la vârfurile unui triunghi regulat, împiedicând doar mișcările de translație ale corpului. Prin urmare, ca și în cazul unui triunghi, corpul poate începe să se rotească în raport cu centrul de rotație, care este punctul de intersecție al normalelor cu limita corpului la punctele de legătură. În acest caz, ecuația pentru traiectoria unui punct al corpului A, situat pe axa OU, și situat la o distanță H de centrul de rotație, va avea aceeași formă ca (1). Condițiile pentru valorile funcțiilor de deplasare a centrului de rotație (2) în acest caz vor lua
Kobylyansky Gorbunov
Dmitri Mihailovici Valeri Fedorovici
Student postuniversitar al catedrei. staționar și - doc. tehnologie. științe, prof. departament sută
vehicule de transport, vehicule staţionare şi vehicule de transport
f(2kp/p)=g(2kp/p)=0. (7)
Condiția (7) corespunde funcțiilor periodice cu o perioadă de 2n/n, de exemplu 8m(n-m4/2), precum și combinațiilor lor liniare ale formei (3) și altor funcții care descriu curbe închise. Raționament similar cu cel menționat mai sus duce la aceleași ecuații (4-6), care fac posibilă calcularea formei corpului, a poziției acestuia în timpul rotației și a traiectoriei centrului de rotație cu oscilații ale corpului compatibile cu rotația. . Un exemplu de astfel de calcule este Fig. 4, în care linia punctată arată poziția inițială a corpurilor, linia continuă arată poziția corpurilor când se rotesc printr-un unghi l/3, iar în centrul fiecărei figuri se află traiectoria completă a centrului de rotație în timpul unei rotații complete a corpului. Și deși în acest exemplu este luată în considerare doar mișcarea orizontală a centrului de rotație O, ca centru al unui n-gon, rezultatele obținute arată o gamă largă de forme posibile ale unui corp cu un grad de libertate, combinând mișcarea de rotație. cu oscilații în prezența a patru, cinci și șase conexiuni.
Metoda rezultată pentru calcularea compatibilității mișcărilor de rotație și oscilație a corpurilor cu un grad de libertate poate fi utilizată și fără adăugiri pentru corpurile spațiale pentru care sunt interzise mișcările de-a lungul celei de-a treia coordonate și rotațiile în alte planuri de coordonate.
Gogolin Viaceslav Anatolievici
Dr. tehnologie. științe, prof. departament matematician aplicat şi
În cazul particular al unui sistem cu două grade de libertate, formele pătratice T, P, Ф vor fi, respectiv, egale.
iar ecuaţiile diferenţiale ale vibraţiilor mici vor lua forma
Să luăm în considerare oscilațiile libere ale unui sistem conservator. În acest caz
iar ecuațiile diferențiale iau forma:
Condițiile inițiale pentru a avea forma:
Datorită definiției pozitive a formei patratice a energiei cinetice, coeficienții de inerție generalizati satisfac relațiile
şi relaţii similare pentru coeficienţii cvasielastici
sunt condiţii suficiente pentru stabilitatea poziţiei de echilibru a sistemului.
Coeficienții și care leagă coordonatele generalizate și în ecuațiile (4.5) se numesc coeficienți de cuplare inerțială și, respectiv, elastică. Dacă sistemul oscilator are un coeficient , se numește sistem cu o legătură elastică, iar dacă este un sistem cu o legătură inerțială.
Un sistem parțial corespunzător coordonatei generalizate se numește sistem oscilator condiționat cu un grad de libertate, obținut din sistemul original dacă se impune o interdicție asupra modificării tuturor coordonatelor generalizate, cu excepția . Frecvențele parțiale sunt frecvențele naturale ale sistemelor parțiale:
Deoarece ecuațiile (4.5) conțin numai coordonate generalizate și derivatele lor secundare în raport cu timpul, căutăm soluția lor sub forma
unde sunt încă cantități necunoscute.
Înlocuind (4.8) în (4.5) și echivalând coeficienții sinusurilor, obținem un sistem algebric omogen în raport cu și:
Pentru ca sistemul algebric omogen (4.9) să aibă o soluție diferită de zero, acesta trebuie să fie degenerat, i.e. determinantul său trebuie să fie egal cu zero:
În consecință, soluția (4.7) va avea sens numai pentru acele valori care îndeplinesc condiția (4.9). Extinderea (4.10), obținem
O ecuație prezentată sub forma (4.10), (4.11) sau (4.12) se numește frecvență După cum se poate observa din (4.12), ecuația de frecvență este o ecuație biquadratică. Se numesc valorile găsite de la (4.10)–(4.12). frecvențele naturale ale oscilațiilor sistemului.
Studiul rădăcinilor ecuației de frecvență ne permite să tragem următoarele concluzii:
1) dacă poziția de echilibru este stabilă, atunci ambele rădăcini ale ecuației de frecvență sunt pozitive;
2) prima frecvență naturală a sistemului este întotdeauna mai mică decât frecvența parțială mai mică, iar a doua este mai mare decât frecvența parțială mai mare.
Pentru sistemele oscilatoare cu cuplaj elastic ( = 0), egalitatea
Să scriem două soluții parțiale independente corespunzătoare frecvențelor și , sub forma
unde a doua cifră din index corespunde numărului sau numărului de frecvență tonuri de vibrație.
Constantele nu sunt independente, deoarece sistemul (4.9) este degenerat. Coeficienții sunt legați între ei prin relații
Unde . (4,15)
Unde . (4,16)
Ținând cont de (4.15) și (4.16), soluțiile particulare (4.14) vor avea forma
Se numesc oscilații ale căror ecuații au forma (4.17). principalele fluctuatii. Ele reprezintă vibrații armonice cu frecvențe și respectiv. Coeficienții se numesc coeficienții de distribuție a amplitudinii. Ele caracterizează raportul amplitudinilor în vibrațiile principale sau formă principalele fluctuatii.
Coeficienții de distribuție a amplitudinilor și, în consecință, formele vibrațiilor principale, precum și frecvențele naturale, sunt determinate de parametrii sistemului oscilator însuși și nu depind de condițiile inițiale. Prin urmare, se numesc modurile de vibrație, precum și frecvențele, propriile moduri de vibrație când oscilează după tonul corespunzător.
Soluția generală a sistemului de ecuații (4.5) poate fi reprezentată ca suma soluțiilor parțiale găsite (4.17)
Soluția generală conține patru constante nedeterminate, care trebuie determinate din condițiile inițiale (4.6).
În condiții inițiale arbitrare, ambele constante și sunt diferite de zero. Aceasta înseamnă că modificarea în timp a fiecărei coordonate generalizate va fi suma oscilațiilor armonice cu frecvențele și . Și astfel de oscilații nu sunt doar nearmonice, dar în cazul general nu sunt periodice.
Să luăm în considerare cazul oscilațiilor libere ale sistemului, când frecvențele naturale ale oscilațiilor sistemului diferă puțin unele de altele:
Să notăm diferența dintre argumentele sinusurilor în soluția generală (4.18) a ecuațiilor de oscilații libere
Când valoarea este , și odată cu creșterea timpului, această dependență crește foarte lent datorită micii sale. Apoi
Ținând cont de ultima egalitate, soluția generală a ecuațiilor de vibrații libere (4.18) se poate scrie astfel:
În aceste ecuații
Deoarece expresiile (4.21) depind de și , iar unghiul se modifică lent în timp, oscilațiile considerate (4.20) vor fi oscilații cu o amplitudine care variază periodic. Perioada de modificare a amplitudinii în acest caz este mult mai lungă decât perioada de oscilație (Fig. 4.1). Dacă coeficienții de distribuție a amplitudinii au semne diferite, atunci minimul corespunde maximului și invers. Pe măsură ce prima vibrație principală se intensifică, intensitatea celei de-a doua vibrații principale scade și invers, adică energia de mișcare a sistemului pare periodic concentrată într-una sau alta verigă a acestui sistem vibrant. Acest fenomen se numește bătaie.
O altă abordare pentru rezolvarea problemei oscilațiilor libere ale sistemului este posibilă - găsirea unor noi coordonate generalizate și numite normal sau principal, pentru care, în orice condiții inițiale, mișcarea va fi de o singură frecvență și armonică.
Relația dintre coordonatele generalizate și , alese arbitrar, și coordonatele principale și poate fi exprimată astfel:
unde și sunt coeficienți de distribuție a amplitudinii (coeficienți de formă). Se poate arăta că trecerea de la coordonatele inițiale la cele principale duce formele pătratice de energie cinetică și potențială la forma canonică:
Înlocuind expresiile (4.23) obținute pentru și în ecuațiile Lagrange de al doilea fel, obținem ecuațiile pentru mici oscilații ale sistemului în coordonate principale: . Expresiile pentru energia cinetică și potențială vor avea forma canonică: și
Oscilații cu mai multe grade de libertate.
Scurte informații din teorie.
Sisteme cu n puterilibertateîn dinamică se obișnuiește să se numească astfel de sisteme, pentru a fixa complet starea geometrică a cărei în orice moment este necesar să se stabilească P parametri, de exemplu poziție (deviații) P puncte. Poziția altor puncte este determinată de tehnici statice convenționale.
Un exemplu de sistem cu P gradele de libertate pot fi un fascicul sau un cadru plat dacă masele părților sau elementelor sale individuale sunt considerate condiționat (pentru a facilita calculele dinamice) concentrate în P puncte, sau dacă poartă n mase mari (motoare, motoare), în comparație cu care se poate neglija greutatea proprie a elementelor. Dacă masele individuale concentrate („punctuale”) se pot deplasa, atunci când oscilează, în două direcții, atunci numărul de grade de libertate al sistemului va fi egal cu numărul de conexiuni care ar trebui impuse sistemului pentru a elimina deplasările. a tuturor maselor.
Dacă un sistem cu n grade de libertate este scos din echilibru, acesta se va angaja vibratii libere, iar fiecare „punct” (masă) va efectua oscilații poliarmonice complexe de tipul:
constantele A iși B i depind de condițiile inițiale de mișcare (abateri ale maselor de la nivelul static și viteze în momentul de timp t=0). Numai în unele cazuri speciale de excitare a oscilațiilor se poate transforma mișcarea poliarmonică pentru mase individuale în armonică, adică ca într-un sistem cu un grad de libertate:
Numărul de frecvențe naturale ale unui sistem este egal cu numărul gradelor sale de libertate.
Pentru a calcula frecvențele naturale, este necesar să se rezolve așa-numitul determinant al frecvenței, scris sub această formă:
Această condiție în formă extinsă dă ecuația P gradul de determinat P valorile lui ω 2, care se numește ecuație de frecvență.
Prin δ 11, δ 12, δ 22 etc. sunt indicate posibilele mișcări. Astfel, δ 12 este deplasarea în prima direcție a punctului de localizare a primei mase de la o forță unitară aplicată în a doua direcție la punctul de amplasare a celei de-a doua mase etc.
Cu două grade de libertate, ecuația frecvenței ia forma:
Unde pentru două frecvențe avem:
În cazul în care masele individuale M i poate efectua și mișcări de rotație sau numai de rotație în combinație cu mișcări liniare, atunci i-acea coordonata va fi unghiul de rotatie, iar in determinantul de frecventa masa
M i trebuie înlocuit cu momentul de inerție al masei J i; în consecință, posibile mișcări în direcție i--lea coordonate ( δ i 2 , δ i 2 etc.) vor fi mişcări unghiulare.
Dacă orice masă oscilează în mai multe direcții - i-mu și k-th (de exemplu, verticală și orizontală), atunci o astfel de masă participă la determinant de mai multe ori sub numerele M i lor kși corespunde mai multor mișcări posibile ( δ ii, δ kk, δ ik, etc.).
Rețineți că fiecare frecvență naturală are propria sa formă specială de oscilație (natura unei axe curbe, a unei linii de deviere, a deplasării etc.), care în cazuri individuale, speciale, se poate dovedi a fi o formă validă de oscilație, chiar dacă este liberă. oscilațiile sunt excitate corespunzător (impulsuri de selecție adecvate, puncte de aplicare a acestora etc.). În acest caz, sistemul va oscila în conformitate cu legile mișcării sistemului cu un grad de libertate.
În cazul general, după cum reiese din expresia (9.1), sistemul efectuează oscilații poliarmonice, dar este evident că orice linie elastică complexă, care reflectă influența tuturor frecvențelor naturale, poate fi descompusă în componente individuale ale formei, fiecare dintre care corespunde propriei frecvenţe Procesul de descompunere a adevăratului mod de vibrație în componente (care este necesar atunci când se rezolvă probleme complexe de dinamică structurală) se numește descompunere în moduri de vibrații naturale.
Dacă în fiecare masă, mai precis - în direcția fiecărui grad de libertate, se aplică o forță perturbatoare, variind în timp conform legii armonice
sau, care este indiferent pentru scopuri ulterioare, iar amplitudinile forțelor pentru fiecare masă sunt diferite, iar frecvența și fazele sunt aceleași, atunci, cu acțiunea prelungită a unor astfel de forțe perturbatoare, sistemul va efectua oscilații forțate în stare staționară cu frecvența a forţei motrice. Amplitudini de mișcări în orice direcție i-actul grad în acest caz va fi:unde determinantul D se scrie conform (9.2) cu ω înlocuit cu θ și, prin urmare, D≠0; D i este determinată de expresia:
acestea. i Coloana a treia a determinantului D se înlocuiește cu o coloană compusă din termeni de forma: Pentru cazul a două grade de libertate: (9.6)Și în mod corespunzător
La calcularea vibrațiilor forțate ale grinzilor cu secțiune transversală constantă care transportă mase concentrate (Fig. 9.1).
Este mai ușor, totuși, să folosiți următoarele formule pentru amplitudinile deformarii, unghiul de rotație, momentul încovoietor și forța tăietoare în orice secțiune a grinzii:
(9.7)Unde y 0 , φ 0 , M 0 , Q 0 – amplitudini de deformare, rotație, moment și forță tăietoare a secțiunii inițiale (parametri inițiali); M iȘi J i- masa si momentul ei de inertie (masele concentrate); semnul ∑ se aplică tuturor forțelor și maselor concentrate situate de la secțiunea inițială la subiect.
Formulele indicate (9.7) pot fi folosite și la calcularea frecvențelor naturale, pentru care este necesar să se ia în considerare forțele perturbatoare ∑ Riși momentele ∑ Mi egal cu zero, înlocuiți frecvența oscilațiilor forțate θ cu frecvența oscilațiilor naturale ω și, presupunând existența oscilațiilor (oscilații libere), scrieți expresiile (9.7) în raport cu secțiunile în care sunt situate mase concentrate și amplitudinile sunt deja cunoscute ( secțiuni de referință, axa de simetrie etc.). Obținem un sistem de ecuații liniare omogene. Echivalând determinantul acestui sistem cu zero, vom putea calcula frecvențele naturale.
Se dovedește a fi recomandabil să folosiți expresiile (9.4) și (9.5) pentru a determina amplitudinile ( y 0 , φ 0 , etc.) la X=0, apoi folosind (9.7) se calculează toate celelalte elemente de deviere.
Mai complexă este problema calculării mișcărilor unui sistem cu mai multe grade de libertate sub acțiunea unei sarcini arbitrare care se modifică în timp și se aplică diferitelor mase.
Când rezolvați o astfel de problemă, ar trebui să procedați după cum urmează:
a) determina frecventele naturale si modurile de vibratii naturale;
b) regrupați sarcina dată între mase sau, după cum se spune, descompuneți-o conform modurilor de vibrații naturale. Numărul de grupuri de sarcină este egal cu numărul de frecvențe naturale ale sistemului;
c) după efectuarea celor două operații auxiliare de mai sus, se face un calcul pentru fiecare grupă de sarcini folosind formule cunoscute din teoria oscilațiilor unui sistem cu un grad de libertate, iar frecvența oscilațiilor naturale în aceste formule se consideră a fi cea căruia îi corespunde acest grup de sarcină;
d) se însumează soluții parțiale din fiecare categorie de sarcini, ceea ce determină soluția finală a problemei.
Determinarea frecvenţelor naturale se realizează conform (9.2). În ceea ce privește identificarea formelor de vibrații naturale, aici este necesar să ne ghidăm după proprietatea de bază a oricărei forme de vibrații naturale, că aceasta reprezintă linia de influență a deviației de la forțe (al căror număr este egal cu numărul de vibrații naturale). grade de libertate) proporțională cu produsul maselor și ordonatele deformațiilor punctelor de atașare ale maselor. Pentru mase egale, forma vibrațiilor naturale reprezintă linia de deviere a forțelor proporționale cu ordonatele deformarii; diagrama de sarcină este similară cu diagrama de deformare.
Cea mai joasă frecvență corespunde celei mai simple forme de vibrație. Pentru grinzi, cel mai adesea această formă corespunde îndeaproape axei curbe a sistemului sub influența propriei greutăți. Dacă această structură se dovedește a fi mai puțin rigidă în orice direcție, de exemplu în orizontală, atunci pentru a identifica natura axei curbe dorite, trebuie să se aplice în mod condiționat propria greutate în această direcție.